5.2.1: Boids Flocking Simulation#
- Duration:
20-25 minutes
- Level:
Intermediate
Overview#
The boids algorithm, created by Craig Reynolds in 1987, demonstrates one of the most fascinating phenomena in computational systems: emergent behavior. Complex, lifelike patterns arise from just three simple rules.
In this exercise, you will implement a boids simulation that recreates the mesmerizing movement of bird flocks and fish schools. You will discover how local interactions between individuals produce global patterns that appear intelligent and coordinated.
Boids simulation showing emergent flocking behavior from three simple rules#
Learning Objectives
By completing this exercise, you will:
Understand how emergent behavior arises from simple local rules
Implement the three fundamental boids rules: separation, alignment, and cohesion
Create animated visualizations using NumPy and Pillow
Explore parameter tuning to achieve different collective behaviors
Quick Start: See the Flock in Action#
Run this simulation to see boids forming natural-looking flocks:
1import numpy as np
2from PIL import Image, ImageDraw
3import imageio
4
5# Create 30 boids with random positions and velocities
6positions = np.random.rand(30, 2) * 400
7velocities = (np.random.rand(30, 2) - 0.5) * 4
8
9frames = []
10for _ in range(150):
11 # Create frame
12 img = Image.new('RGB', (400, 400), (20, 20, 30))
13 draw = ImageDraw.Draw(img)
14
15 # Draw each boid as a small circle
16 for x, y in positions:
17 draw.ellipse([x-3, y-3, x+3, y+3], fill=(0, 200, 200))
18
19 frames.append(np.array(img))
20
21 # Simple update: move toward average position (cohesion only)
22 center = positions.mean(axis=0)
23 positions += (center - positions) * 0.01 + velocities * 0.5
24 positions = positions % 400 # Wrap at edges
25
26imageio.mimsave('simple_flock.gif', frames, fps=20)
Tip
This simplified example shows only the cohesion rule. The full boids algorithm combines three rules for realistic flocking behavior.
Core Concepts#
What Are Boids?#
The term boids refers to bird-like objects that follow simple behavioral rules. Craig Reynolds introduced this algorithm to create realistic animations of flocking birds for computer graphics [Reynolds1987].
The key insight of the boids algorithm is that complex group behavior does not require complex individual behavior. Each boid only needs to:
Know the positions and velocities of nearby neighbors
Apply three simple steering rules
Update its own position and velocity
From these local interactions, global patterns emerge naturally. No boid knows the overall flock shape or movement direction. The collective behavior is self-organizing [Camazine2001].
Did You Know?
Reynolds’ boids paper, presented at SIGGRAPH 1987, has become a landmark of behavioral animation and Artificial Life research. The algorithm has since been used in countless films, video games, and scientific simulations, including Batman Returns (1992) and The Lion King (1994).
The Three Rules of Flocking#
Every boid follows three steering behaviors that determine its acceleration at each time step:
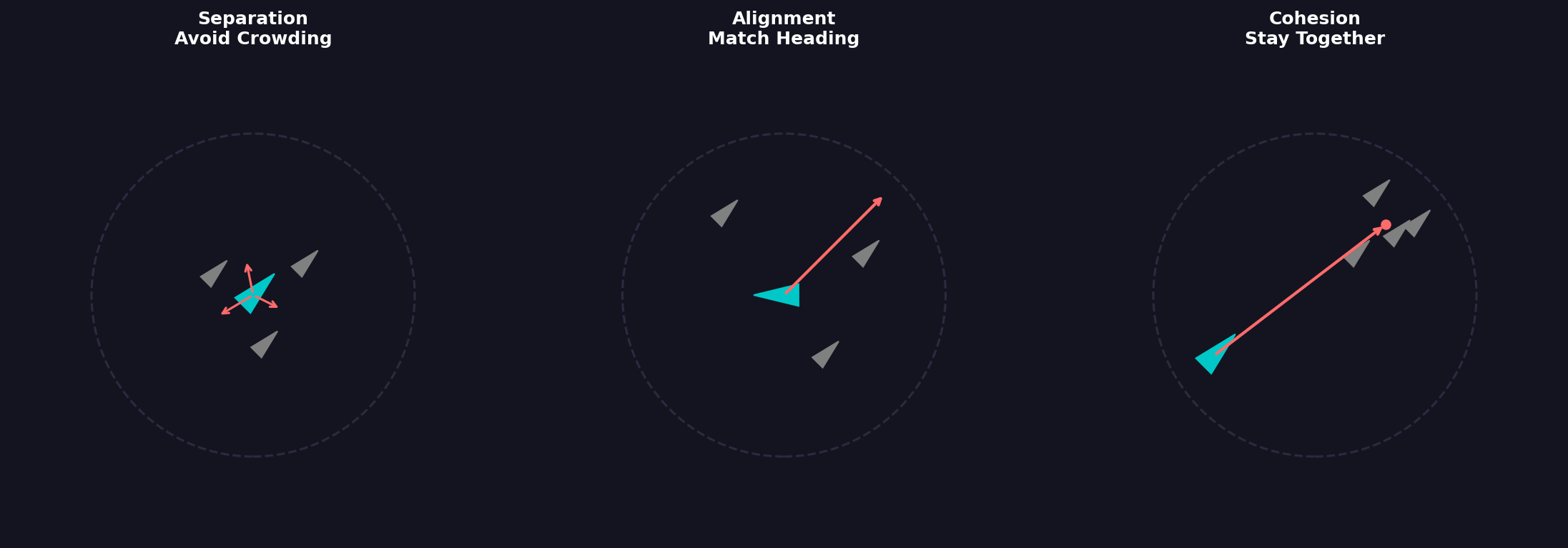
The three boids rules: Separation, Alignment, and Cohesion. Diagram generated with Claude - Opus 4.5.#
Rule 1: Separation
Boids steer away from neighbors that are too close. This prevents collisions and overcrowding.
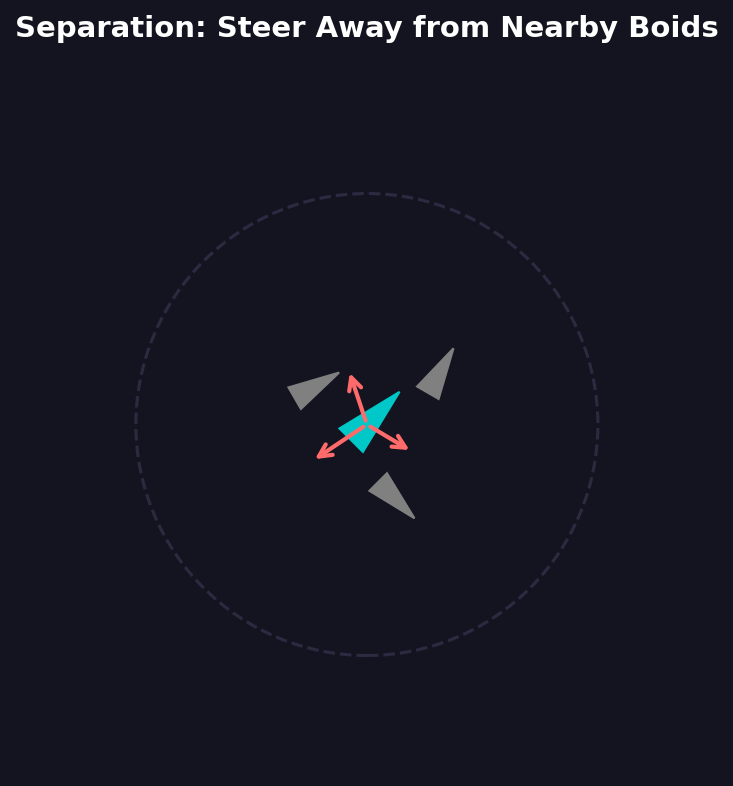
Separation: Each boid steers away from neighbors within its personal space. Diagram generated with Claude - Opus 4.5.#
# For each nearby neighbor that's too close
if distance < personal_space:
# Create a force pointing away from the neighbor
away_vector = my_position - neighbor_position
separation_force += away_vector / distance # Stronger when closer
Rule 2: Alignment
Boids match the velocity (direction and speed) of nearby neighbors. This creates coordinated movement.
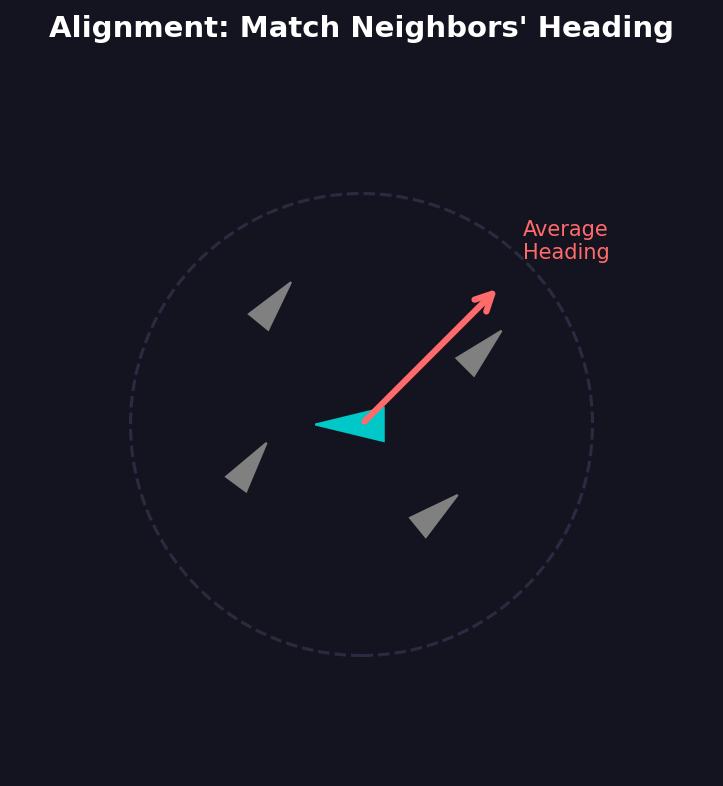
Alignment: Each boid steers to match the average heading of nearby neighbors. Diagram generated with Claude - Opus 4.5.#
# Calculate average velocity of all neighbors
average_velocity = sum(neighbor_velocities) / num_neighbors
# Steer toward that average
alignment_force = average_velocity - my_velocity
Rule 3: Cohesion
Boids steer toward the center of mass of nearby neighbors. This keeps the flock together.
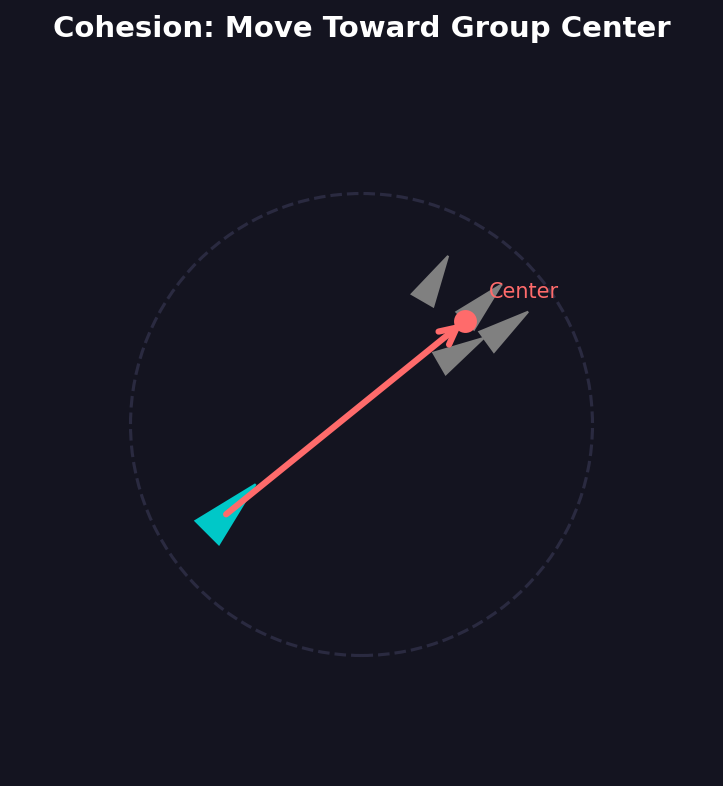
Cohesion: Each boid steers toward the average position of nearby neighbors. Diagram generated with Claude - Opus 4.5.#
# Calculate center of nearby neighbors
center_of_mass = sum(neighbor_positions) / num_neighbors
# Steer toward that center
cohesion_force = center_of_mass - my_position
Implementation Strategy#
The boids algorithm updates all agents simultaneously at each time step:
For each frame:
1. For each boid, find all neighbors within perception radius
2. Calculate separation, alignment, and cohesion forces
3. Combine forces with adjustable weights
4. Update velocity (apply acceleration, limit speed)
5. Update position (move, wrap at edges)
6. Render the frame
Key Parameters
The behavior of the flock depends on several tunable parameters:
Parameter |
Typical Value |
Effect |
|---|---|---|
|
50 pixels |
How far each boid can “see” neighbors |
|
1.5 |
Strength of collision avoidance |
|
1.0 |
Strength of velocity matching |
|
1.0 |
Strength of flock cohesion |
|
4 pixels/frame |
Maximum velocity magnitude |
Important
The balance between these weights dramatically affects flock behavior. High separation creates scattered, nervous flocks. High cohesion creates tight, ball-like groups. High alignment creates streams of parallel motion.
Real-World Applications#
This algorithm demonstrates principles used throughout computational systems:
Robotics: Swarm robots coordinate using similar local rules [Brambilla2013]
Game AI: Non-player characters use steering behaviors for natural movement [Reynolds1999]
Biology: Scientists model fish schools and bird flocks to understand animal behavior [Vicsek2012]
Hands-On Exercises#
Exercise 1: Execute and Explore#
Run the full boids simulation and observe the emergent behavior.
Tasks:
Run
boids.pyin the exercise directoryWatch the generated
boids_simulation.gifObserve how boids that start randomly gradually form organized groups
Reflection Questions:
Question 1: Why do the boids form groups?
The boids form groups because of the cohesion rule. Each boid steers toward the average position of its neighbors, which pulls scattered boids together over time. Once groups form, the alignment rule keeps them moving in the same direction.
Question 2: What happens when two groups meet?
When two groups come within each other’s perception radius, they begin to influence each other. The cohesion rule pulls them together, and alignment causes them to match velocities. Groups often merge into larger flocks, or pass through each other if moving in different directions.
Question 3: Why do boids at the edge behave differently?
Edge boids have neighbors on only one side, so cohesion pulls them inward. Interior boids are pulled equally from all sides and maintain their position within the flock. This creates a natural flock boundary without explicit boundary rules.
Exercise 2: Modify Rule Weights#
Explore how different parameter combinations change flock behavior.
Tasks:
Open boids.py and find the configuration section. Modify the weights and observe the results:
Experiment 1: Separation Dominant
SEPARATION_WEIGHT = 3.0
ALIGNMENT_WEIGHT = 0.5
COHESION_WEIGHT = 0.5
What to expect
Boids maintain large distances from each other. The flock spreads out and becomes diffuse. Individual boids move more independently.
Experiment 2: Alignment Dominant
SEPARATION_WEIGHT = 0.5
ALIGNMENT_WEIGHT = 3.0
COHESION_WEIGHT = 0.5
What to expect
Boids move in parallel streams or lanes. The flock elongates in the direction of movement. Groups may split but each subgroup maintains coordinated direction.
Experiment 3: Cohesion Dominant
SEPARATION_WEIGHT = 0.5
ALIGNMENT_WEIGHT = 0.5
COHESION_WEIGHT = 3.0
What to expect
Boids cluster into tight, ball-like formations. The flock compresses and may oscillate as boids overshoot the center. Movement becomes more chaotic within groups.
Exercise 3: Add Obstacle Avoidance#
Extend the algorithm by adding a fourth rule: obstacle avoidance.
Goal:
Implement a function that makes boids steer away from a circular obstacle in the center of the canvas.
Requirements:
Boids within 1.5x the obstacle radius should steer away
The avoidance force should be stronger when closer to the obstacle
The force should point directly away from the obstacle center
Starter Code:
Open boids_starter.py and find the obstacle_avoidance function with TODO markers.
Hint 1: Distance Calculation
Calculate distance from each boid to the obstacle center:
obstacle_center = np.array([OBSTACLE_X, OBSTACLE_Y])
direction = positions[i] - obstacle_center
distance = np.sqrt(np.sum(direction ** 2))
Hint 2: Avoidance Force
The avoidance force should point away from the obstacle and be stronger when closer:
if distance < OBSTACLE_RADIUS * 1.5 and distance > 0:
# Normalize direction and scale by inverse distance
force = direction / distance # Unit vector away
strength = (OBSTACLE_RADIUS * 1.5 - distance) / distance
steering[i] = force * strength
Complete Solution
def obstacle_avoidance(positions):
"""Steer away from the central obstacle."""
steering = np.zeros_like(positions)
obstacle_center = np.array([OBSTACLE_X, OBSTACLE_Y])
for i in range(len(positions)):
direction = positions[i] - obstacle_center
distance = np.sqrt(np.sum(direction ** 2))
# Avoid if within 1.5x obstacle radius
if distance < OBSTACLE_RADIUS * 1.5 and distance > 0:
# Force pointing away, stronger when closer
normalized = direction / distance
strength = (OBSTACLE_RADIUS * 1.5 - distance) / distance
steering[i] = normalized * strength
return steering
Obstacle avoidance in action: Boids steer around the central obstacle (dark red circle) while maintaining flocking behavior.#
Challenge Extension:
Add a predator that boids flee from. The predator moves slowly toward the nearest boid, while all boids within a large radius steer away from it.
Boids with predator behavior: The red predator chases the nearest boid while all boids within the fear radius (shown as circle) flee in the opposite direction.#
Summary#
Key Takeaways
Emergent behavior arises when complex global patterns result from simple local rules
The boids algorithm uses three rules: separation (avoid crowding), alignment (match heading), and cohesion (stay together)
Each boid only needs information about nearby neighbors within its perception radius
Parameter tuning (weights) dramatically affects collective behavior
The algorithm is highly extensible with additional rules like obstacle avoidance
Common Pitfalls
Forgetting to limit forces: Without maximum force limits, boids can accelerate wildly
Not handling edge cases: When a boid has no neighbors, avoid division by zero
Ignoring edge wrapping: Use modulo operations to wrap positions at canvas boundaries
Unbalanced weights: Start with equal weights and adjust incrementally
References#
Reynolds, C. W. (1987). Flocks, herds and schools: A distributed behavioral model. ACM SIGGRAPH Computer Graphics, 21(4), 25-34. https://doi.org/10.1145/37402.37406 [Original boids paper that introduced the algorithm]
Reynolds, C. W. (1999). Steering behaviors for autonomous characters. In Proceedings of Game Developers Conference 1999 (pp. 763-782). https://www.red3d.com/cwr/steer/ [Practical implementation guide for games]
Camazine, S., Deneubourg, J. L., Franks, N. R., Sneyd, J., Theraulaz, G., & Bonabeau, E. (2001). Self-Organization in Biological Systems. Princeton University Press. [Comprehensive theory of biological self-organization]
Vicsek, T., & Zafeiris, A. (2012). Collective motion. Physics Reports, 517(3-4), 71-140. https://doi.org/10.1016/j.physrep.2012.03.004 [Physics perspective on collective motion]
Brambilla, M., Ferrante, E., Birattari, M., & Dorigo, M. (2013). Swarm robotics: A review from the swarm engineering perspective. Swarm Intelligence, 7(1), 1-41. https://doi.org/10.1007/s11721-012-0075-2 [Applications in robotics]
Shiffman, D. (2012). The Nature of Code. Self-published. https://natureofcode.com/ [Excellent pedagogical resource for creative coding and simulation]
NumPy Developers. (2024). NumPy documentation: Broadcasting. https://numpy.org/doc/stable/user/basics.broadcasting.html [Technical reference for vectorized operations]