3.4.1 - Convolution#
- Duration:
20-25 minutes
- Level:
Intermediate
Overview#
In this exercise, you will learn how convolution transforms images by sliding a small grid of numbers (called a kernel) across every pixel. This fundamental operation powers everything from image (such as Instagram and Snapchat) filters to neural network vision systems.
By the end of this module, you will understand why a simple 3x3 matrix can blur an image, detect edges, or sharpen details.
Learning Objectives
By completing this module, you will:
Understand convolution as a “sliding window” operation that combines pixels with kernel weights
Apply different kernels to achieve blur, sharpen, and edge detection effects
Implement your own convolution function from scratch using nested loops
Recognize convolution as the foundation of Convolutional Neural Networks (CNNs) [LeCun1998]
Quick Start#
Let’s see convolution in action immediately. Run this script to blur a checkerboard pattern:
Download simple_convolution.py
import numpy as np
from PIL import Image
# Create a checkerboard pattern with sharp edges
CANVAS_SIZE = 256
SQUARE_SIZE = 32
canvas = np.zeros((CANVAS_SIZE, CANVAS_SIZE), dtype=np.float64)
for row in range(CANVAS_SIZE):
for col in range(CANVAS_SIZE):
square_row = row // SQUARE_SIZE
square_col = col // SQUARE_SIZE
if (square_row + square_col) % 2 == 0:
canvas[row, col] = 255.0
# 5x5 blur kernel: each weight = 1/25, so output = mean of 25 neighbors
KERNEL_SIZE = 5
blur_kernel = np.ones((KERNEL_SIZE, KERNEL_SIZE)) / (KERNEL_SIZE ** 2)
# Apply convolution
output_size = CANVAS_SIZE - KERNEL_SIZE + 1
output = np.zeros((output_size, output_size))
for y in range(output_size):
for x in range(output_size):
region = canvas[y:y + KERNEL_SIZE, x:x + KERNEL_SIZE]
output[y, x] = np.sum(region * blur_kernel)
result = Image.fromarray(output.astype(np.uint8), mode='L')
result.save('simple_convolution.png')
Original checkerboard (left) and blurred result (right)#
What just happened? The blur kernel averaged each pixel with its neighbors, turning sharp black-white transitions into smooth gray gradients. Transforming pixels based on their neighborhood, that’s convolution in a nutshell.
Core Concepts#
Core Concept 1: What is Convolution?#
Convolution is a mathematical operation that combines two arrays: an image and a kernel (also called a filter). The kernel is a small matrix of weights (typically 3x3 or 5x5) that slides across the image, computing a weighted sum at each position [Gonzalez2018].
The Three Steps of Convolution:
Position the kernel over a region of the image
Multiply each kernel value by the corresponding pixel value (element-wise)
Sum all the products to produce one output pixel
The kernel slides across each position of the input, computing element-wise products and summing them to produce each output pixel. Diagram generated with Claude - Opus 4.5.#
The Key Insight:
The kernel values determine what the convolution does. A blur kernel has equal positive values—each neighbor contributes equally, so the output is a local average. An edge detection kernel has a positive center and negative surround. Where pixels match their neighbors, positive and negative cancel to zero; where they differ, the kernel responds [Gonzalez2018].
Blur kernel (left) averages all neighbors equally – uniform regions stay bright. Edge detection kernel (right) cancels in uniform regions but responds to intensity changes. Diagram generated with Claude - Opus 4.5.#
Tip
Think of convolution as asking: “What is the weighted average of this pixel’s neighborhood?” The kernel weights define how much each neighbor contributes.
Core Concept 2: Understanding Kernels#
Different kernels produce dramatically different effects. See below for the most common 4 types of kernels:
Identity Kernel (no change):
identity = np.array([
[0, 0, 0],
[0, 1, 0],
[0, 0, 0]
])
The center value is 1, all others are 0. The output equals the input [Gonzalez2018].
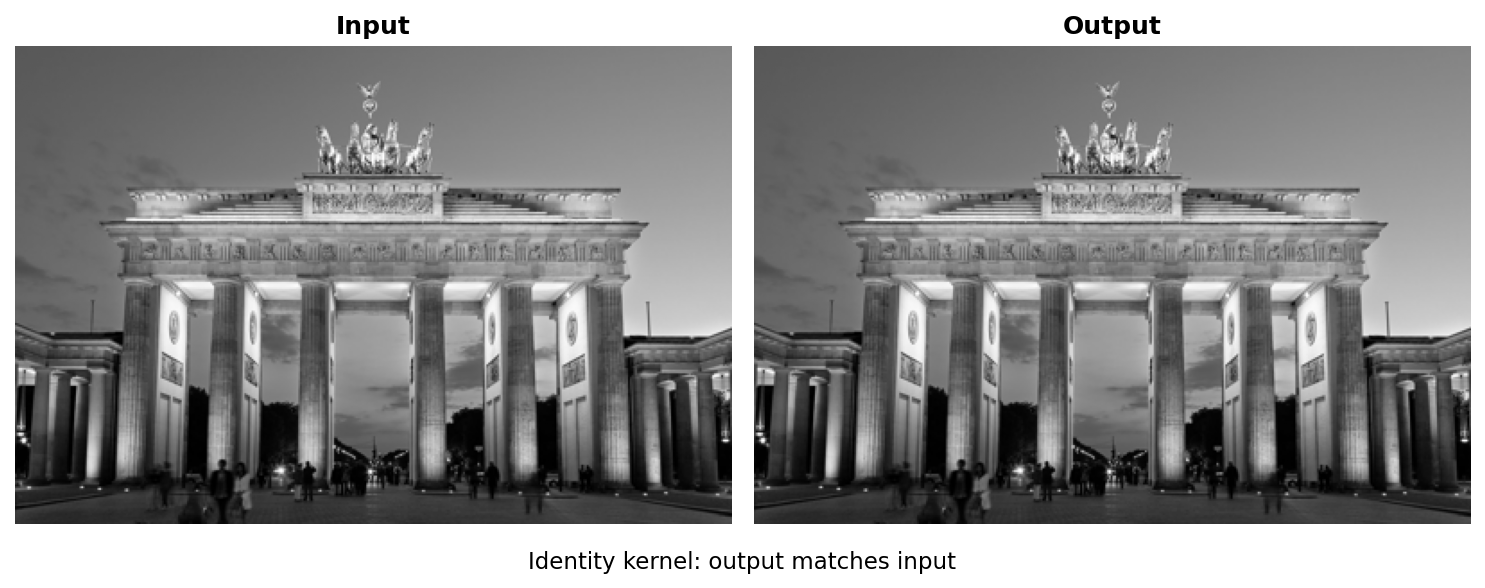
Identity kernel: output matches input#
Blur Kernel (smoothing):
blur = np.array([
[1, 1, 1],
[1, 1, 1],
[1, 1, 1]
]) / 9.0 # Normalize so values sum to 1
All values are equal, so the output is the average of the 3x3 neighborhood [Gonzalez2018].
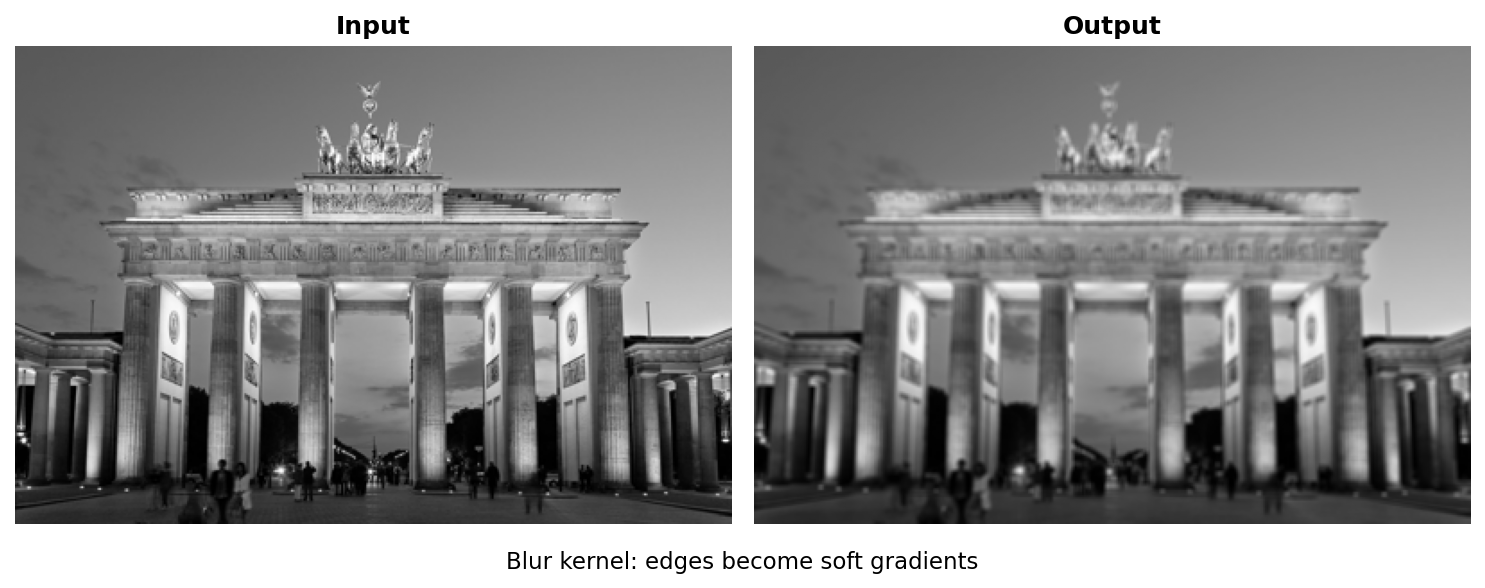
Blur kernel: edges become soft gradients#
Sharpen Kernel (enhance edges):
sharpen = np.array([
[ 0, -1, 0],
[-1, 5, -1],
[ 0, -1, 0]
])
The center value is larger than 1, neighbors are negative. This amplifies the center pixel relative to its neighbors [Gonzalez2018].
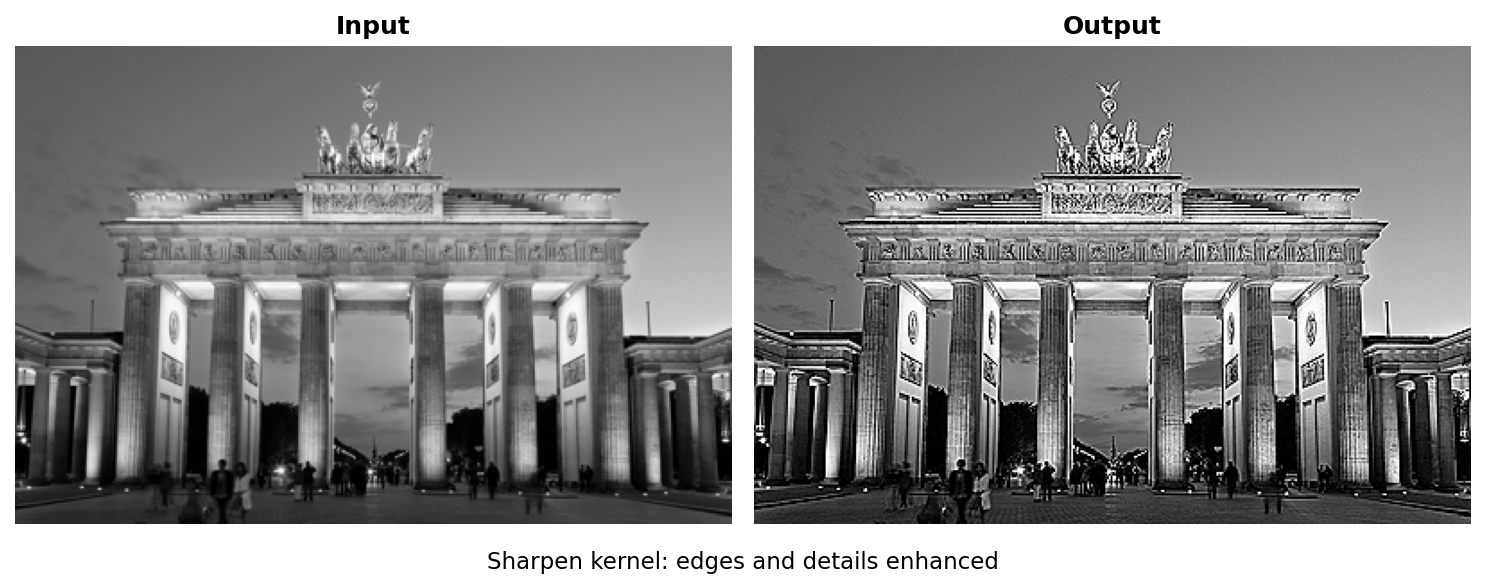
Sharpen kernel: edges and details enhanced#
Edge Detection Kernel (find boundaries) [Marr1980]:
edge_detect = np.array([
[-1, -1, -1],
[-1, 8, -1],
[-1, -1, -1]
])
Positive center, negative neighbors. Uniform regions become zero; boundaries become bright.
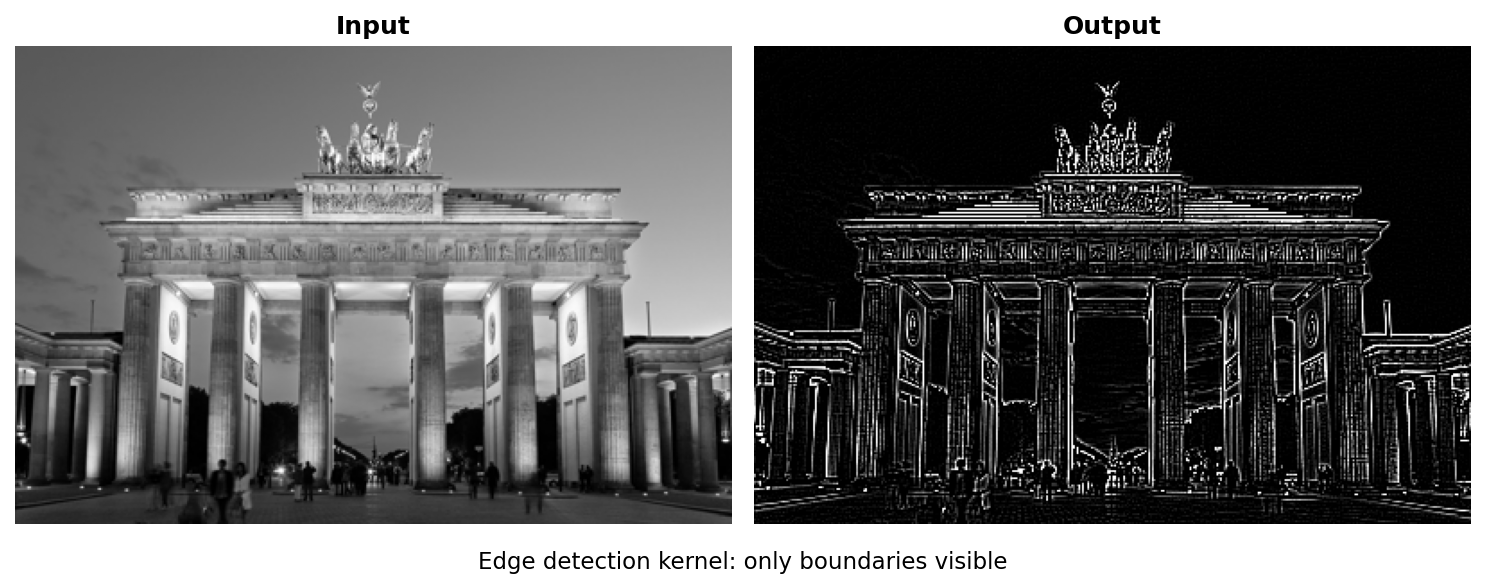
Edge detection kernel: only boundaries visible#
Important
Kernel normalization matters! For blur kernels, the values should sum to 1 to preserve brightness. For edge detection, values can sum to 0 (outputs only changes, not absolute values) [Gonzalez2018].
What about output values? When a kernel sums to 0, the output can include negative numbers. Consider an edge detection kernel applied to a bright pixel (200) surrounded by dark neighbors (100): the result is 200 x 8 + 100 x (-8) = 800, well above 255. Where the center is darker than its neighbors, the result goes negative. Two common approaches handle this [Gonzalez2018]:
Clipping (
np.clip(result, 0, 255)): Simple and fast. Negative values become 0, values above 255 become 255. Good enough for most visualization tasks.Min-max normalization (
255 * (result - min) / (max - min)): Rescales the full output range to [0, 255], preserving all detected edges including faint negative responses. Use this when you need to see all edges, not just the strongest ones.
Core Concept 3: Border Handling and Padding#
When the kernel reaches the edge of an image, part of it extends beyond the boundary, there are no pixels to multiply. Without any handling, the output image shrinks by kernel_size - 1 pixels in each dimension. You saw this in the Quick Start: a 256x256 image convolved with a 5x5 kernel produced a 252x252 output (output_size = CANVAS_SIZE - KERNEL_SIZE + 1) [Gonzalez2018].
Padding solves this by adding extra pixels around the image border before convolution begins. The amount of padding needed is pad = kernel_size // 2, which ensures the kernel always has a complete neighborhood, even at corner pixels.
Without padding, the kernel cannot process border pixels (missing neighbors). Edge-replicate padding copies border values outward, ensuring every pixel has a complete neighborhood. Diagram generated with Claude - Opus 4.5.#
Three Common Padding Strategies [Gonzalez2018]:
# Zero-padding: fill border with black (0)
padded = np.pad(image, pad, mode='constant', constant_values=0)
# Edge-replicate: copy outermost pixel values outward
padded = np.pad(image, pad, mode='edge')
# Reflect: mirror pixels at the boundary
padded = np.pad(image, pad, mode='reflect')
Zero-padding (
mode='constant') fills the border with zeros. Simple, but can introduce dark edge artifacts since the kernel “sees” black pixels that were never in the original image.Edge-replicate (
mode='edge') copies the outermost row and column values outward. This is the default choice in this module because it preserves edge brightness without introducing artificial values.Reflect (
mode='reflect') mirrors the image at the boundary. This produces the smoothest results because the padded values are natural continuations of the image content [Gonzalez2018].
Tip
The formula pad = kernel_size // 2 works because a kernel of size k extends (k-1)/2 pixels in each direction from its center. For a 3x3 kernel, pad = 1; for a 5x5 kernel, pad = 2. With this much padding, the output has the same dimensions as the input.
Hands-On Exercises#
Now it is time to apply what you’ve learned with three progressively challenging exercises. Each builds on the previous one using the Execute -> Modify -> Create approach [Sweller1985], [Mayer2020].
Exercise 1: Execute and Explore#
Run exercise1_execute.py to see how four different kernels transform the same photograph:
python exercise1_execute.py
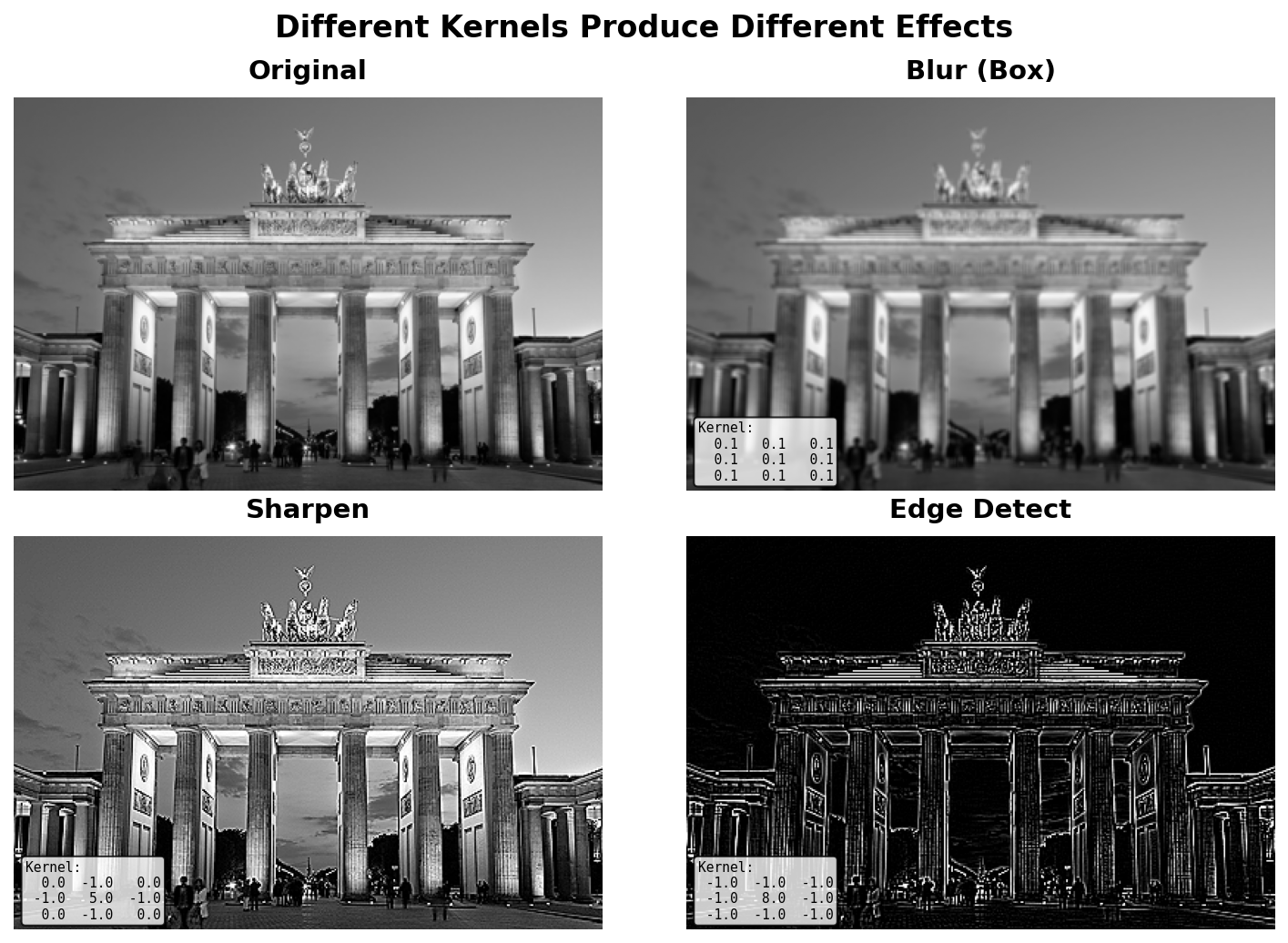
Four kernels applied to the Brandenburg Gate image#
Reflection Questions:
Look at the edge detection result. Why do uniform regions (like the sky) appear black?
Answer
Edge detection computes differences between the center pixel and its neighbors. In uniform regions all pixels are the same, so the differences cancel out to zero (black). Only where pixel values change (at edges) does the kernel produce a non-zero response.
Why does the sharpen kernel make the image look “crisper”?
Answer
The sharpen kernel has a center weight of 5 and neighbor weights of -1. This subtracts the local average from the center pixel, amplifying any differences. Edges (where values change rapidly) get boosted, making details more visible.
What would happen if you used a larger kernel (e.g., 7x7 blur instead of 3x3)?
Answer
A larger blur kernel averages over more pixels, producing a stronger smoothing effect. A 7x7 blur would make the image noticeably softer than a 3x3 blur, but would also take longer to compute (49 multiplications per pixel instead of 9).
Exercise 2: Modify Kernel Values#
In this exercise you will change the numbers inside a convolution kernel and observe how different values produce different visual effects.
The script starts with the identity kernel (center = 1, everything else = 0), which passes the image through unchanged. Your task is to modify the kernel values in the marked edit zone to achieve each goal below.
# =============================================
# MODIFY the kernel values below to achieve each goal
# =============================================
kernel = np.array([
[0, 0, 0],
[0, 1, 0], # <-- CHANGE THESE VALUES
[0, 0, 0] # to achieve each goal
], dtype=np.float64)
# =============================================
Goal 1: Double the brightness
Change the center value from 1 to 2. Leave all other values at 0.
What to expect
The output image will be noticeably brighter than the original. Every pixel value is multiplied by 2 (a pixel with value 100 becomes 200). Values above 255 are clipped to white. This demonstrates that kernel values act as multipliers on pixel intensity.
Goal 2: Blur the image
Set all nine values to 1 and divide the entire kernel by 9.0:
kernel = np.array([
[1, 1, 1],
[1, 1, 1],
[1, 1, 1]
], dtype=np.float64) / 9.0
What to expect
The image will look slightly softer, with fine details smoothed out. Each output pixel is the average of its 3x3 neighborhood. Dividing by 9 keeps the total brightness the same (the kernel sums to 1). If you forget the / 9.0, the image will be extremely bright because the kernel sums to 9 instead of 1.
Goal 3: Sharpen the image
Set the center to 5 and the four cross-neighbors (up, down, left, right) to -1. Keep corners at 0:
kernel = np.array([
[ 0, -1, 0],
[-1, 5, -1],
[ 0, -1, 0]
], dtype=np.float64)
What to expect
The image will look crisper with enhanced edges. The center weight of 5 amplifies the current pixel, while the negative neighbors subtract the local average. This boosts differences at edges and makes fine details pop. Notice the kernel still sums to 1 (5 + 4 x -1 = 1), so overall brightness is preserved.
Goal 4: Detect edges
Set the center to 8 and all eight neighbors to -1:
kernel = np.array([
[-1, -1, -1],
[-1, 8, -1],
[-1, -1, -1]
], dtype=np.float64)
What to expect
The output will be mostly black with bright white lines where edges exist in the original image. The kernel sums to 0, meaning uniform regions produce zero output (black). Only where pixel values change does the kernel respond. This is the Laplacian edge detector [Marr1980].
Exercise 3: Create Your Own Convolution#
Implement your own convolution function from scratch. The starter code is about 80% complete – you fill in the core loop (4 lines of code). The script processes the Brandenburg Gate photograph [BrandenburgGateImage].
Download Brandenburg Gate image
{kind=link}
Your task: Open exercise3_create.py and complete the four TODOs inside apply_convolution():
def apply_convolution(image, kernel):
kernel_size = kernel.shape[0]
pad = kernel_size // 2
height, width = image.shape
output = np.zeros((height, width), dtype=np.float64)
padded = np.pad(image, pad, mode='edge')
# TODO 1: Loop over every row (y from 0 to height)
# TODO 2: Loop over every column (x from 0 to width)
# TODO 3: Extract the region under the kernel
# TODO 4: Multiply region by kernel and sum
return output
Hint 1: Loop bounds
Loop from 0 to height and 0 to width. Because we padded the image, we can safely access padded[y:y+kernel_size, x:x+kernel_size] for all valid positions.
Hint 2: Extracting the region
Use NumPy slicing: region = padded[y:y + kernel_size, x:x + kernel_size]. This grabs a kernel-sized patch from the padded image starting at position (y, x).
Hint 3: Computing the output pixel
np.sum(region * kernel) multiplies each pixel by its kernel weight (element-wise), then adds everything up into a single number. Assign this to output[y, x].
Complete Solution
1def apply_convolution(image, kernel):
2 kernel_size = kernel.shape[0]
3 pad = kernel_size // 2
4 height, width = image.shape
5 output = np.zeros((height, width), dtype=np.float64)
6 padded = np.pad(image, pad, mode='edge')
7
8 for y in range(height):
9 for x in range(width):
10 # Extract the region under the kernel
11 region = padded[y:y + kernel_size, x:x + kernel_size]
12 # Element-wise multiply and sum
13 output[y, x] = np.sum(region * kernel)
14
15 return output
The key insight is that padding allows us to process every pixel, including edge pixels, without special boundary handling code.
Post-processing note: The starter code uses np.clip(result, 0, 255) to handle edge detection’s out-of-range values – this is correct and sufficient. The solution file (convolution_solution.py) uses min-max normalization instead, which reveals faint edges that clipping would discard. See the “Kernel normalization matters!” note in Core Concept 2 for details on when each approach is appropriate.
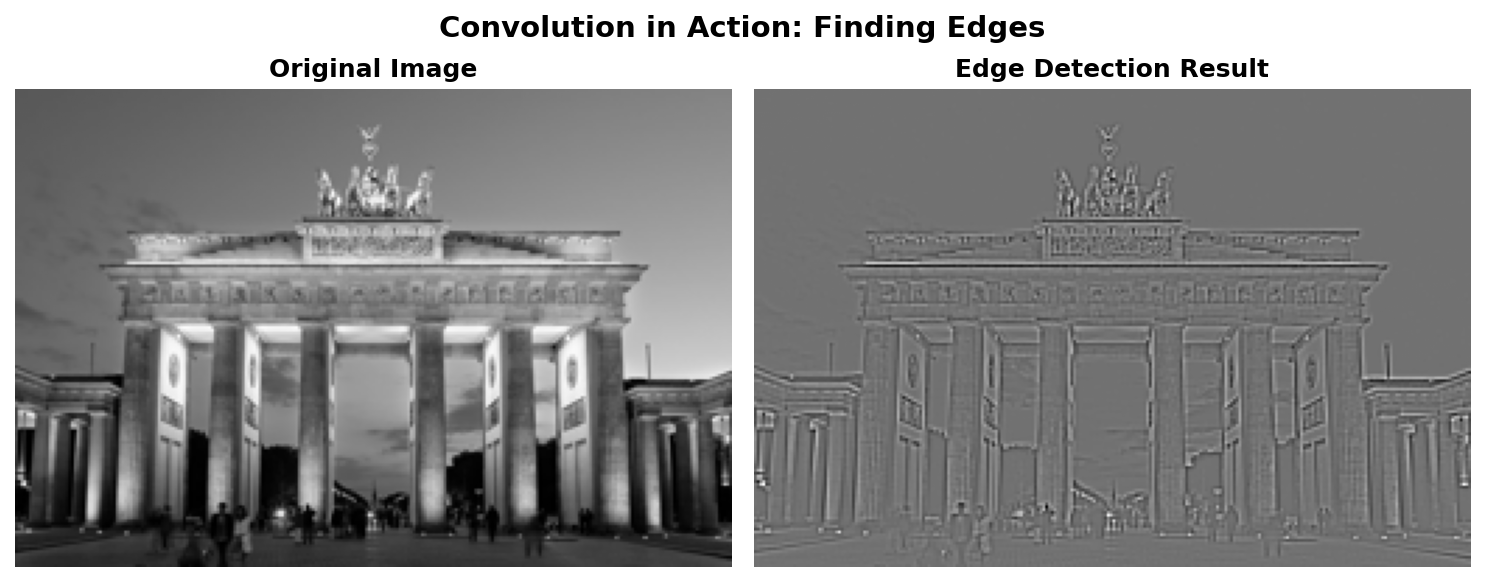
Edge detection applied to the Brandenburg Gate image#
Make It Your Own
After completing the TODOs, try these experiments:
Change
KERNEL_CHOICEat the top of the script to'blur','sharpen', or'identity'and re-run.Design your own kernels by adding entries to the
KERNELSdictionary:Horizontal edge detector (finds horizontal lines only):
np.array([[-1,-1,-1], [2,2,2], [-1,-1,-1]]). This kernel sums to 0 and computes the difference between the middle row and the rows above/below [Sobel1968].Vertical edge detector (finds vertical lines only):
np.array([[-1,2,-1], [-1,2,-1], [-1,2,-1]]). The horizontal kernel transposed. Sobel (1968) and Prewitt (1970) independently developed similar directional operators [Sobel1968] [Prewitt1970].Emboss (3D illusion):
np.array([[-2,-1,0], [-1,1,1], [0,1,2]]). Creates a “lit from top-left” effect by computing diagonal differences.
Try a 5x5 blur kernel:
np.ones((5, 5)) / 25.0. How does it compare to the 3x3 version?
Note
Implementation Note
The convolution implementations in this module are inspired by official documentation and standard image processing references:
Gonzalez & Woods (2018), Digital Image Processing, Chapter 3
Summary#
In this module, you learned the fundamental operation behind image filters and neural network vision systems.
Key Takeaways:
Convolution slides a kernel across an image, computing weighted sums at each position. What the kernel does depends on its values: uniform weights blur by averaging, center-heavy weights sharpen by contrast enhancement, and zero-sum weights detect edges by responding only to intensity changes.
One technical detail: blur kernels should sum to 1, or output brightness will drift. Edge detection kernels sum to 0 by design—they extract differences, not absolute values.
This same operation, with learned weights, forms the backbone of Convolutional Neural Networks [LeCun1998].
Common Pitfalls to Avoid:
Forgetting to normalize blur kernels (causes image brightening or darkening)
Not handling borders correctly (causes output size reduction or edge artifacts)
Using integer math when float precision is needed (causes rounding errors)
Further Exploration#
For a more interactive exploration of convolution concepts, see the Jupyter notebook:
GenerativeConvolution.ipynb- Interactive examples with parameter sliders
For built-in convolution filters, see the Pillow ImageFilter module [PILDocs].
References#
Gonzalez, R.C. and Woods, R.E. (2018). Digital Image Processing (4th ed.). Pearson. Chapter 3: Intensity Transformations and Spatial Filtering. [Foundational textbook on image processing including convolution theory]
Sobel, I. and Feldman, G. (1968). “A 3x3 Isotropic Gradient Operator for Image Processing.” Presented at the Stanford Artificial Intelligence Project (SAIL). [Original edge detection operator using convolution]
LeCun, Y., Bottou, L., Bengio, Y., and Haffner, P. (1998). “Gradient-based learning applied to document recognition.” Proceedings of the IEEE, 86(11), 2278-2324. [Seminal paper on CNNs using convolution for feature learning]
Marr, D. and Hildreth, E. (1980). “Theory of edge detection.” Proceedings of the Royal Society of London B, 207(1167), 187-217. https://doi.org/10.1098/rspb.1980.0020 [Theoretical foundations of edge detection]
Harris, C.R., et al. (2020). “Array programming with NumPy.” Nature, 585, 357-362. https://doi.org/10.1038/s41586-020-2649-2 [NumPy array operations used in convolution]
Clark, A., et al. (2024). Pillow (PIL Fork) Documentation. https://pillow.readthedocs.io/ [ImageFilter module for built-in convolution kernels]
Prewitt, J.M.S. (1970). “Object enhancement and extraction.” In B. Lipkin and A. Rosenfeld (Eds.), Picture Processing and Psychopictorics (pp. 75-149). Academic Press. [Alternative edge detection operator]
Krizhevsky, A., Sutskever, I., and Hinton, G.E. (2012). “ImageNet classification with deep convolutional neural networks.” Advances in Neural Information Processing Systems, 25, 1097-1105. [AlexNet paper demonstrating convolution in deep learning]
Sweller, J. (1988). “Cognitive load during problem solving: Effects on learning.” Cognitive Science, 12(2), 257-285. https://doi.org/10.1207/s15516709cog1202_4 [Cognitive load theory foundational paper]
Mayer, R.E. (2020). Multimedia Learning (3rd ed.). Cambridge University Press. ISBN: 978-1-316-63896-0 [Multimedia learning principles for instructional design]
Wolf, T. (n.d.). Brandenburg Gate [Photograph]. Wikimedia Commons. CC BY-SA 3.0. https://commons.wikimedia.org/wiki/File:Brandenburger_Tor_abends.jpg
{kind=link}